OVERVIEW:
Distributed surface networks can provide regional sensing, communications, position, navigation, and timing (PNT), and power distribution. However, it’s often not possible to install such networks with a delicate human touch. The Rapid Lunar Lander is a remotely-emplaced, hardened electronics package to service this need.
- Can you harden an electronics package sufficiently to survive a drop from a high altitude onto a relatively soft surface?
- Can you make that hardened electronics package self-initialize to a pre-programmed state upon landing?
- Can you make that hardened electronics package autonomously recognize other like packages and self-organize into an internet of things (IOT)?
BACKGROUND:
Special Operations forces routinely rely on networks of unattended ground sensors (UGS) to inform their systems in denied areas during covert operations. As a result, remote emplacement of these networks is essential. Moreover, rapid insertion of these networks largely eliminate aerodynamic deceleration (e.g., parachutes) as an option to facilitate a soft landing.
USE CASE EXAMPLE: WHY IT’S IMPORTANT
Similarly, evolving lunar sensing, communications, navigation, and power distribution networks will rely on networks of UGS to support manned and robotic endeavors. Due to the lack of atmosphere, remotely-emplaced lunar surface UGS will also not be able to rely on aerodynamic deceleration, but need to survive a landing onto the lunar regolith that covers almost the entire lunar surface. The regolith is generally from 4 to 5 m thick in mare areas and from 10 to 15 m in the older highland regions. The density of regolith at the Apollo 15 landing site averages approximately 1.35 g/cm3 for the top 30 cm, and it is approximately 1.85g/cm3 at a depth of 60 cm.
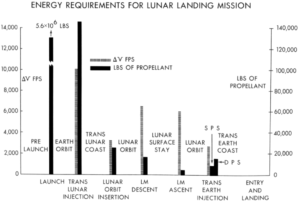

Spacecraft escape Earth when their propulsion system is able to provide sufficient acceleration (called delta-v) to lift them out of the Earth’s gravity well. That same propulsion system can insert them into a lunar orbit where they achieve a state of equilibrium within the Moon’s gravity well. NASA plans to place its Lunar Gateway into a specific one of these stable lunar orbits, called a Near Rectilinear Halo Orbit (NRHO). Similarly, the Air Force Research Lab Space Vehicles Directorate (AFRL/RV) plans to put another spacecraft, the Lunar Orbiting Base of Operations (LOBO), into that same orbit. LOBO will be carrying your landers! It is your challenge to use some combination of hardening and deceleration to place your landers on the lunar surface in a working state, where they can self-initialize and then self-organize into an IOT.
PROBLEM SPONSORS:
AFRL/RV: Chuck Finley, Lt Jake Lutz
NASA Ames Research Center: Bruce Yost